Autor:
Christy White
Loomise Kuupäev:
4 Mai 2021
Värskenduse Kuupäev:
15 Mai 2024

Sisu
Lego Mindstorm NXT robotid on suurepärane mänguasi ja veelgi parem viis programmeerimise õppimiseks. Robotiga kaasasolevat programmi on lihtne ja intuitiivne kasutada ning koos sellega saate panna roboti tegema ükskõik mida. Pärast roboti ehitamist Lego tükkide abil on aeg programmeerida seda ülesande või ülesannete kombinatsiooni jaoks. Jätkake lugemist, et õppida.
Sammud
1. osa 5-st: Alustamine
Installige ja avage programm. Robot peab olema kaasas nii Macile kui ka Windowsile mõeldud programmiga või saate selle alla laadida Lego Mindstormi veebisaidilt. Plaadi sisestamisel või allalaadimise avamisel ilmub installiaken. Programmi installimiseks ja selle avamiseks järgige juhiseid.
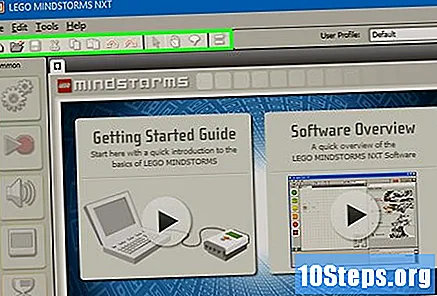
Siit saate teada, kuidas programmis navigeerida. Programmi salvestamiseks, olemasoleva programmi avamiseks või uue loomiseks kasutage ülaosas asuvat tööriistariba. Toimingute sisestamiseks, teisaldamiseks ja kustutamiseks kasutage musta noolekujulist "osuti" -riista. Tööriist "pan", mis näeb välja nagu väike valge käsi, võimaldab teil programmi akna akna sisse lohistada, et saaksite selles liikuda. Tööriist "kommentaar", mis on kõnemull, võimaldab teil sisestada teksti oma programmi osadesse, nii et saate lisada kommentaare, et kirjeldada ja aidata teistel teie programmi mõista.- Akna paremas servas asub Robo Center juhendid ja juhised mitmelt erinevalt robotilt, mida saate ehitada ja programmeerida. Robo keskuse ülaosas asuv teine sakk avab oma portaali, mis annab teile juurdepääsu veebiressurssidele, mis aitavad teil oma programmeerimist.
- Pange hiir toimingu kohale, et avada paremas alanurgas selle toimingu kirjeldus ja kuvada või muuta selle toimingu sätteid akna allosas.
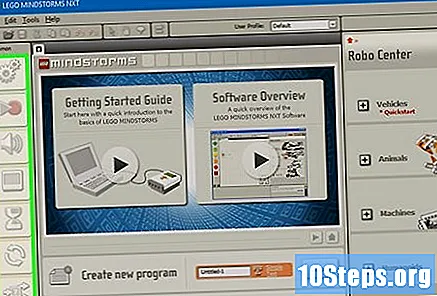
Siit saate teada, kuidas pääseda juurde erinevatele toimingutele. Vasakul asuv tegumiriba sisaldab kõiki toiminguid, mida teie robot saab teha. Riba allosas olevad kolm sakki annavad teile juurdepääsu nende toimingute erinevatele komplektidele. Uurige seda, et avastada ja kogeda erinevaid ülesandeid, mis teie robotil võivad olla.- Kõige vasakpoolsem sakk koos rohelise ringiga sisaldab enim levinud toiminguid, näiteks Liiguta (Liikumine), Heli (Heli), Loop (Korda) ja Lülita. See paigutus võimaldab teil kiiret juurdepääsu toimingutele, mida te kõige sagedamini kasutate, kuid see ei anna teile juurdepääsu ülejäänud osadele.
- Keskmine kolme värvilise ruuduga sakk sisaldab kõiki kaasasolevaid toiminguid, mis on jagatud kategooriatesse. Asetage hiir ülaosas oleva rohelise ringi kohal, et pääseda juurde tavalistele toimingutele ja toimingutele, näiteks heli mängimine või värvilise tule aktiveerimine. Kõigi toimingute leidmiseks uurige teisi nuppe.
- Viimane võrdusmärgiga vahekaart on kohandatud toimingutega, mille olete loonud või Internetist alla laadinud.
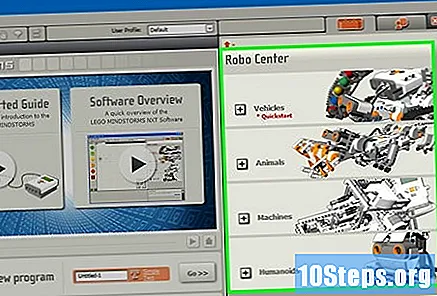
Alustage õpetusega. Programm sisaldab mitmeid õpetusi, mis juhendavad teid oma esimestest programmidest. Minge paremal asuvasse Robo keskusesse ja klõpsake programmi kategoorias, mida soovite luua. Esimese programmi jaoks võiksite alustada Shooterbot'ist sõidukites. See õpetus on lihtne, kuid tutvustab teile saadaolevaid põhilisi juhtelemente ning üldisi kodeerimise ja testimise tavasid.
Järgides juhendaja juhiseid, lohistage toimingud oma programmi. Muutke oma sätteid vastavalt vajadusele tagamaks, et iga toiming teeb täpselt seda, mida soovite. Liituge erinevate toimingutega, paigutades need järjestikku, ühendades neid programmi läbiva voolu abil. Pange toimingud ahelasse või lülitage need toimingud selle juhtimisavalduse juurde.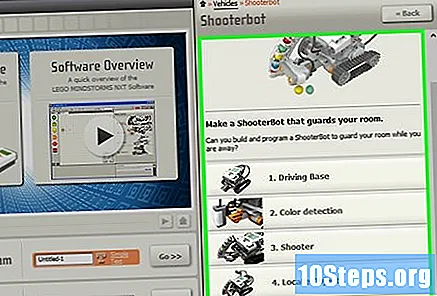
Kui olete oma programmi lõpetanud, laadige see alla oma roboti intelligentsesse tellisse. Ühendage tellis arvutiga USB-kaabli abil. Programmiakna paremas alanurgas olev nupunurk võimaldab teil suhelda ühendatud NXT-seadmega. Nende nuppude vasakus alanurgas laaditakse programm teie seadmesse alla. Kui olete allalaadimise lõpetanud, ühendage nutikas tellis lahti, sisestage see oma robotisse ja käivitage programm, et näha, kas see töötab.
Osa 2/5: oma roboti juhtimine
Liigutage oma robotit operatsiooni Teisaldamine abil. Sellel operatsioonil on kaks käiku. Lisage oma programmi ja kohandage oma sätteid. Roboti liigutamiseks kasutage rehvidega ühendatud uksi. Kui ühendasite rattad pordi B ja C külge, veenduge, et teisaldamise toiming oleks konfigureeritud pordi B ja C jaoks.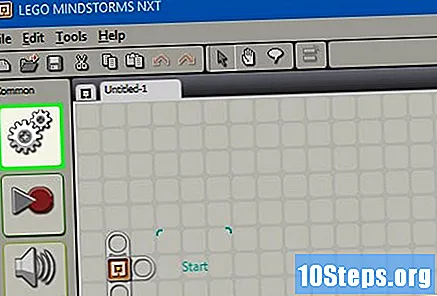
- Liikuge edasi, tagasi või peatage täielikult, määrates suuna. Pöörake rooliseadmeid kasutades.
- Liikuge edasi kindla arvu pöörete, teatud aja või kraadi võrra. Või määrake kestuseks "Piiramatu", nii et teie robot liigub edasi, kuni saate käskluse, hiljem programmis, peatada.
Tehke muid toiminguid, näiteks pildistage, kasutades käsku Mootor. Shooterboti õpetuses loob teie snaiper ühenduse pordiga A. Selle juhtimiseks kasutage mootorit (näidatud ühe käiguna), mis aktiveerib pordi A. Reguleerige sätteid selle mootori täpse töö juhtimiseks, määrates suuna (edasi ( edasi), tagasi või peatatud (parad)), tegevus, tugevuse tase ja liikumise kestus.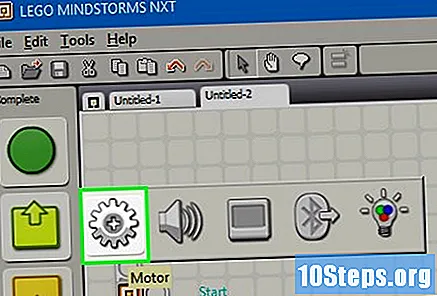
- Tühistades valiku "Oota lõpuleviimist", saab robot enne mootori toiminguga juhitud liikumise lõpuleviimist oma programmis järgmisi käske täita. See võimaldab näiteks teie robotil samal ajal kõndida ja pildistada.
- Mootori käsk viib läbi kõik toimingud, mida teostab tema juhitav mootor. Ehitage oma robot nii, et mootor tõstab aluse, viskab palli, pöörab robotit või teeb midagi muud, mida soovite. See käsk võimaldab teie roboti töös loovust ja paindlikkust; ära kasutada seda.
Kasutage andureid, et robot saaks keskkonnaga suhelda. Asetage nutika kiibi pordidesse ultraheli-, puute- ja värvusandur ning kasutage neid valguse, värvi, heli ja puudutuse tundmiseks. Teie robot suudab ka aega jälgida ja teada selle pöörlemist. Need andurid võimaldavad teie programmil tegutseda ainult siis, kui need on aktiveeritud. Näiteks võib teil olla programm, mis ütleb punase värvi kohta punast, kuid mitte sinise värvi korral.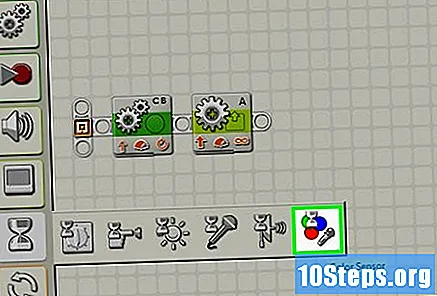
Kasutage toiminguid, et panna oma robot asju tegema. Nende hulka kuulub värvilise tule sisse- või väljalülitamine, heli esitamine failist, pildi või teksti kuvamine intelligentsel tellisklaaniekraanil või sõnumi saatmine Bluetoothi kaudu.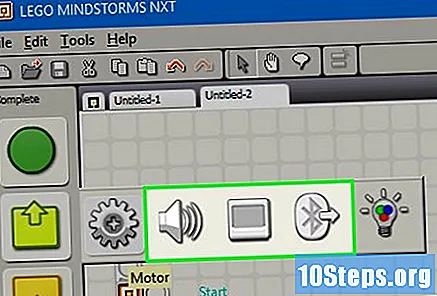
Osa 3/5: ahelate ja lülitite kasutamine
Saate aru, kuidas silmused töötavad. Need võimaldavad teil käskude seeriat täita korduvalt, tähtajatult või kindlaksmääratud arv kordi, kuni teatud tingimus on täidetud või kuni teatud toiming on teostatud.
- Näiteks selleks, et panna teie robot uurima mitut kuuli, kuni see leiab kollase, looge lihtsalt värvisensori juhitav silmus. Järgmise koogi uurimise eest vastutavad ahelasisesed toimingud; silmuse kontrolli all hoitakse seda, et värviandur ei tuvastaks kollast värvi. Seega, kui värvussensor tuvastab pärast kuuli uurimist kollase värvuse, lõpetab ta uute kuulide uurimise ja siirdub programmi järgmisse ossa.
Saate aru, kuidas lülitid töötavad. Lüliti käsib robotil käskude seeriat täita, kui teatud tingimus on tõene, ja teistsuguste toimingute korral, kui mitte, siis tõsi. Need kaks toimingute seeriat on lülitil teineteist välistavad: robot teeb ühte, kuid mitte teist.
- Peske üks lüliti teise sees, et enne toiminguid kontrollida erinevaid tingimusi. Näiteks kasutage pesa lüliteid roboti edasiliikumiseks, kui see ei tuvasta valgust ega heli. Esimene lüliti otsib valgust; kui ühtegi ei tuvastata, siseneb robot teise lüliti juurde, mis otsib helisid. Ainult siis, kui see ei tuvasta heli (pärast valguse mitte tuvastamist), liigub robot edasi.
- Rohkem kui ühe juhtumi lisamiseks väärtusega juhitavasse lülitisse tühistage lüliti sätetes valik "Lame vaade" ja vajutage uue juhtumi lisamiseks sätete paremal küljel, kus tingimused on loetletud. See on kasulik numbri või tekstsõnumi juhtimisel, millel võib olla rohkem kui kaks erinevat väärtust.
Lülitage oma programmi silmus või lülitage sisse ja valige juhtnupp. See määratleb tingimuse, mida robot otsib enne käsu andmist lüliti või silmuse sees. Juhtseade on tavaliselt andur. See võimaldab robotil oma keskkonnale lähemal suhelda.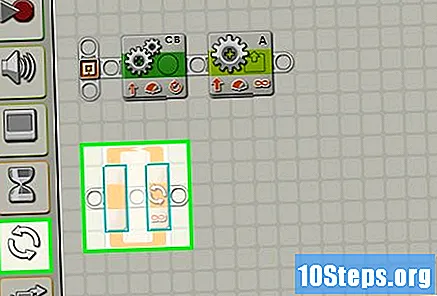
- Lüliteid saab ka väärtuse abil juhtida. Lisage muutuja andmekaabli abil lüliti sihtväljale. Lisage numbrite või tekstide erinevate väärtuste tähed. Näiteks võib teie robot täita käskude seeriat, kui muutuja arv on 0, muid käske, kui see on 1, ja veel muid käske, kui see on mõni muu number.
- Silmuseid saab juhtida ka aja järgi - selles olevad avaldused täidetakse kindlaksmääratud aja jooksul - või loendada. Valige Loogika, et ahel töötab seni, kuni teatud tingimus on tõene, vale või Igavesti, et robot saaks neid ülesandeid tähtajatult täita.
Lohistage muud käsud ahelasse või lülitage. Kõik silmuse sisse pandud toimingud tehakse alati, kui silmus töötab. Lüliti igal juhul tehtavad toimingud tehakse juhul, kui juhtumi tingimus on täidetud. Asendage ja konfigureerige need toimingud nagu tavaliselt.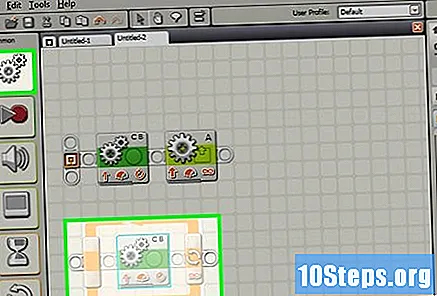
- Soovi korral saate silmuseid ja lüliteid lisada muudesse silmustesse ja lülititesse.
4. osa 5-st: Muutujate kasutamine
Mõista muutujate kasutamist. Muutujad võivad teavet talletada, nii et pääsete sellele hiljem juurde oma programmis. Mõelge neile kui kasti, kuhu paigutate teatud teabe. Seejärel saate selle teabe eemaldada või seda muuta ilma kasti - muutujat - ise muutmata.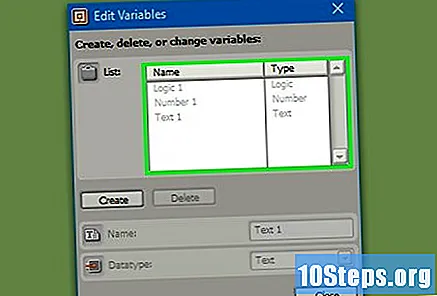
- Iga muutuja võib salvestada numbri, teksti või loogilise väärtuse (õige või vale). Muutuja väärtust saate vabalt muuta, kuid te ei saa selle tüüpi muuta.
- Igal muutujal on kordumatu nimi. Selle nime abil saate sellele muutujale juurde pääseda ja sellele viidata.
Muutuja loomiseks minge jaotisse Redigeerimine> Määratle muutujad. Sisestage ilmuvas aknas oma muutuja nimi ja valige soovitud andmetüüp (loogika, number või tekst). Samuti saate kustutada muutujad, mida te enam ei vaja.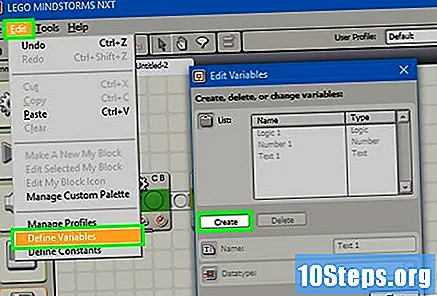
- Andke oma muutujatele kirjeldavad nimed, et saaksite teada, kes nad on. Kui soovite, et muutuja salvestaks tervitussõnumi, mille teie robot saadab, helistage muutuja "text_var_1" asemel muutujale "tervitused" või midagi sama mitmetähenduslikku.
Kasutage muutujaid oma programmis, ühendades need andmekaablite abil oma käskudega. Ühendage need matemaatiliste toimingutega muutujate ühendamiseks või tulemuse salvestamiseks. Ühendage need silmuste või lülititega, et neid juhtimisena kasutada, ja isegi muutke neid silmuse või lüliti sees.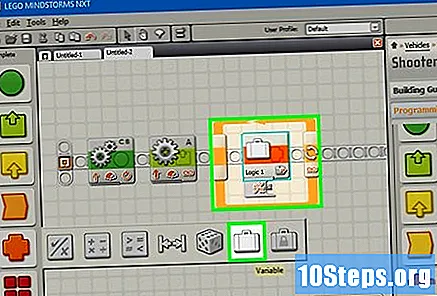
Kasutage konstante muutujate jaoks, mis kunagi ei muutu. Kui soovite oma roboti nime jaoks tekstikonstanti, määratlege see alguses, valides Redigeerimine> Määratle konstandid. Siis saate seda konstanti kasutada, muretsemata, kas väärtus muutub.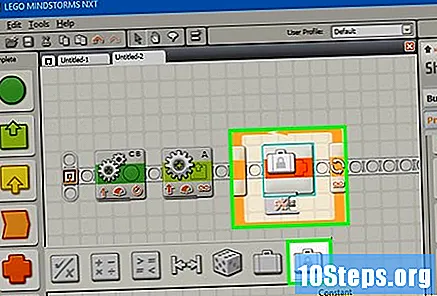
5. ja 5. osa: kohandatud plokkide kasutamine
Saate aru, kuidas kohandatud blokeerib. Looge kohandatud plokk ühe või mitme toimingu seeria jaoks, mida saate programmi ajal mitu korda korrata. Näiteks kui soovite, et teie robot liiguks kolm sekundit edasi ja vildaks punast tuld, siis lisage need juhised kohandatud plokki, nii et pääsete neile kiiresti ja hõlpsalt juurde, kui vajate neid oma programmi lisada.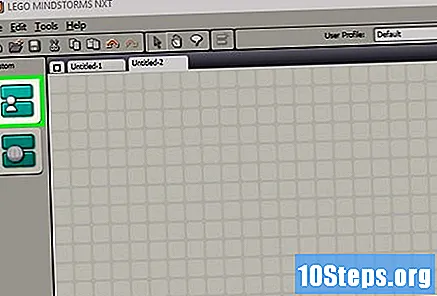
Paigutage erinevad toimingud, millest saab teie kohandatud plokk. Kaasake need oma programmi nagu tavaliselt.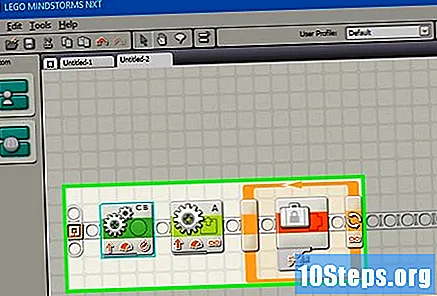
Valige juhised, mida soovite kohandatud plokiks muuta. Hoidke all Shift ja klõpsake igal toimingul. Kui kõik on valitud, klõpsake kommentaaride tööriista kõrval oleval ülemisel tööriistaribal võrdsusmärki. See avab akna nimega "Minu blokeerija". Kohandatud plokkide koostaja avamiseks võite minna ka jaotisse Redigeerimine> Loo uus minu blokk.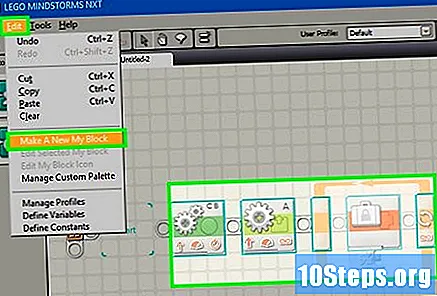
- Kui teil on mõnda andmekaablit, mis sisenevad kohandatud ploki jaoks valitud plokkidesse või lahkuvad neist, kuvatakse need teie bloki portidena ja saate neid ploki kasutamisel programmis ühendada muutujate või muude andmetega.
Sisestage kohandatud ploki nimi ja kirjeldus. Nimi peaks olema lühike, kuid kirjeldav, nii et mäletate täpselt, mida plokk teeb. Kirjeldus peab olema selge ja üksikasjalik ning sisaldama kõiki olulisi märkusi, näiteks suund, mida teie robot peab vaatama, või see, mis tuleb ühendada pordiga A, et blokk korralikult toimiks.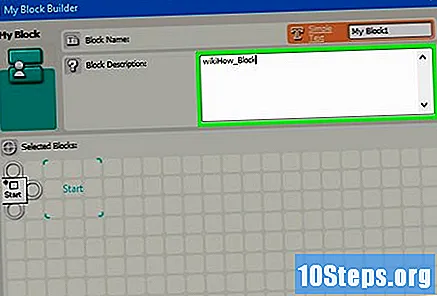
Ikooniredaktorisse minemiseks klõpsake nuppu Edasi. Lohistage kõik soovitud ikoonid oma bloki ikoonile. Kui olete oma ikooni loomise lõpetanud, klõpsake nuppu Lõpeta. Teie programmis asendatakse teie plokile vastavad sammud äsja loodud plokiga.
Kasutage oma programmides kohandatud plokki samal viisil, nagu kasutaksite mõnda muud plokki. Programmeerimise lihtsustamiseks saate isegi ühendada mitu kohandatud plokki. Ole loominguline - kohandatud plokid võivad olla uskumatult kasulikud, kui neid ära kasutada.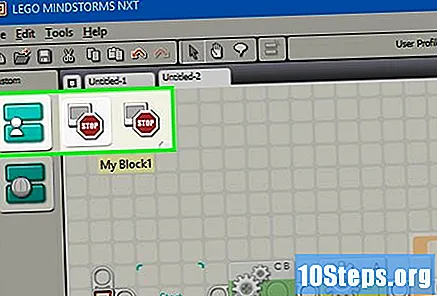
Näpunäited
- Lihtsaim viis programmeerimise õppimiseks, eriti roboti abil, on katsetamine. Kui soovite teada, mida konkreetne toiming teeb, testige seda! Tehke õpitule märkus ja kasutage seda hiljem oma programmides.
- Testige oma programme sageli, et veenduda, kas need töötavad ootuspäraselt.
- Ärge kartke kasutada abijuhendit, et lugeda üksikasju ja näiteid keerukamate plokkide kasutamise kohta.


