Autor:
Laura McKinney
Loomise Kuupäev:
10 Aprill 2021
Värskenduse Kuupäev:
16 Mai 2024

Sisu
- etappidel
- 1. osa Roboti kokkupanek
- 2. osa Ühenduste loomine
- 3. osa Ühendage toiteallikas
- 4. osa Installige Arduino programm
- 5. osa Roboti programmeerimine
Kas soovite õppida oma roboti ehitamist? Roboteid, mida saate ise teha, on palju erinevaid. Enamik inimesi soovib, et nad täidaksid lihtsaid ülesandeid, näiteks läheksid punktist A punkti B. Võite ehitada ühe samalaadsete komponentidega või võite alustada nullist. See on suurepärane tegevus elektroonika ja programmeerimise põhitõdede õppimiseks.
etappidel
1. osa Roboti kokkupanek
-

Hankige materjal. Põhiroboti ehitamiseks on vaja mitmeid lihtsaid elemente. Enamiku neist kaupadest leiate elektroonilisest kauplusest ja paljudest Interneti-müügi saitidest. Mõni põhikomplekt peaks neid ka pakkuma. Robot, mida kavatsete ehitada, ei vaja jootmist. Siin on, mida vajate:- 1 Arduino Uno (või muud tüüpi mikrokontrollerid)
- 2 pidevalt pöörlevat servomootorit
- 2 ratast, mis on servosid kohandatud
- 1 vabaratas
- 1 väike leivalaud, mille mõlemal küljel on positiivne ja negatiivne joon
- 1 vahemaadetektor (nelja kontaktiga pistikuga)
- 1 väike lüliti takistiga 10 kΩ
- purunevad pistikud
- 1 kott 6 x AA patareide jaoks, pistikuga 9 Teie alalisvoolu
- ühenduskaablid
- tugev kahepoolne teip või kuum liim
-
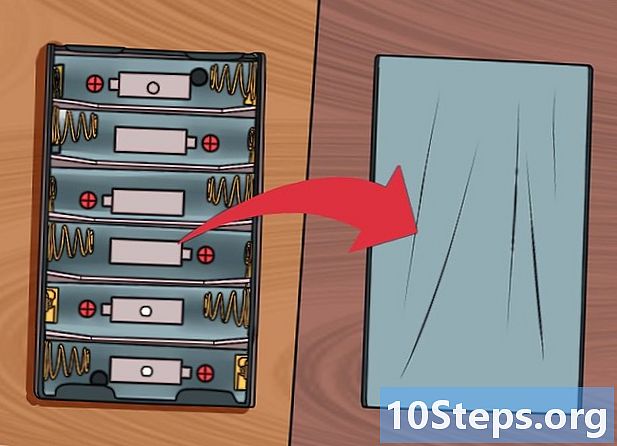
Tagakülje paljastamiseks libistage akuümbris. Kasutate juhtumit roboti ehituse alusena. -
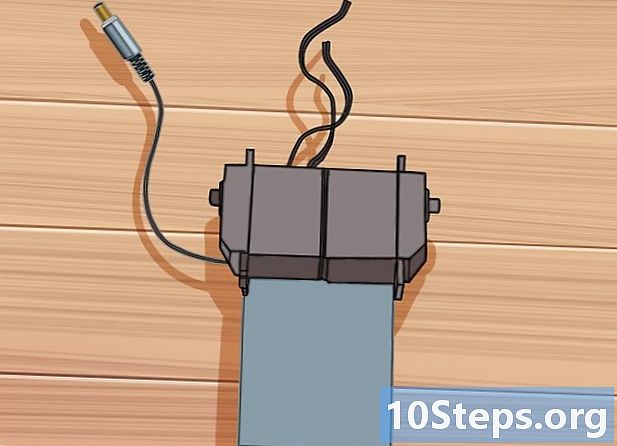
Joondage kaks servo. Joondage mõlemad servomootorid korpuse lõpus. See peab olema toitekaablite ots. Servod peaksid puudutama põhja ja nende pöörlevad mehhanismid peaksid olema pööratud korpuse väliskülje poole. Oluline on servosid õigesti joondada nii, et rattad oleksid sirged. Servokaablid peavad välja ulatuda korpuse siseküljele. -

Kinnitage servosid. Hoidke servosid lindi või liimiga paigal. Peate kontrollima, kas need on korpusega kindlalt kinnitatud. Mootorite tagaosa peab olema korpuse tagaosaga ideaalselt joondatud.- Need peaksid nüüd hõivama poole aku korpuse tagaküljest.
-
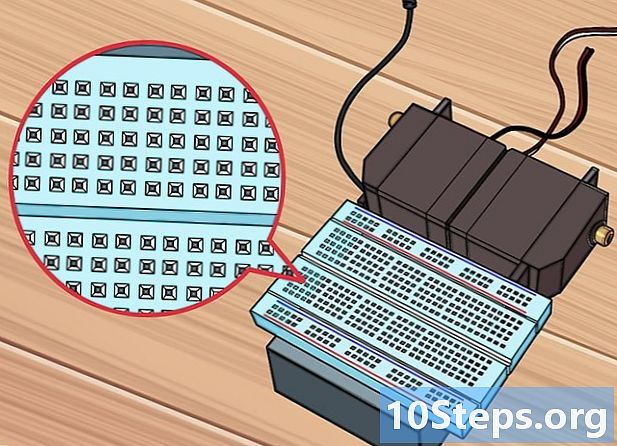
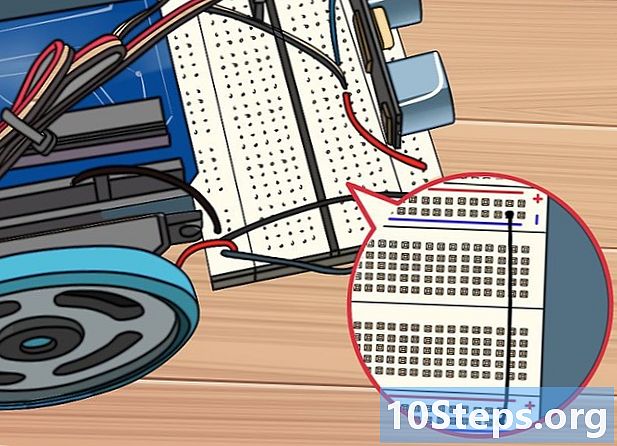
Kinnitage prooviplaat. Liimige katseplaat korpusega risti. See peaks ulatuma pisut korpuse esiküljest ja mõlemalt poolt. Enne jätkamist veenduge, et olete selle kindlalt kinnitanud. A-rida peaks olema servodele kõige lähemal. -

Kinnitage Arduino. Kinnitage Arduino mikrokontroller mootorite ülaosale. Kui olete need fikseerinud, peaks ülaosas olema tasane koht, kus nad puudutavad. Liimige Arduino plaat sellele nii, et USB-port ja toitepistik oleksid prooviplaadiga vastupidises suunas. Arduino pesu peaks prooviplaadil vaid pisut välja ulatuda. -

Paigaldage rattad. Vajutage rattad kindlalt, et kinnitada need mootori pöörleva mehhanismi külge. See võib vajada teatavat tugevust, kuna rattad on konstrueeritud nii, et need oleksid teljel võimalikult tihedad, et tagada võimalikult hea veojõu. -

Kinnitage vabaratas plaadi põhjale. Kui keerate šassii üle, peaksite nägema, et prooviplaadi osa ulatub akukestast välja. Ratta kõrguse reguleerimiseks kinnitage sellele vabaratas, kasutades vajaduse korral klappe. See vaba ratas saab olema esiratas ja see võimaldab robotil pöörduda ükskõik millises suunas.- Kui ostsite komplekti, võis vabakäik olla tarnitud koos sirmidega, mille abil saate veenduda, et see puudutab maad.
2. osa Ühenduste loomine
-

Eemaldage kaks kolme kontaktiga pistikut. Kasutate seda servomootorite ühendamiseks prooviplaadiga. Vajutage kaardid plastikust välja, nii et need oleksid mõlemal küljel ühesuurused. -

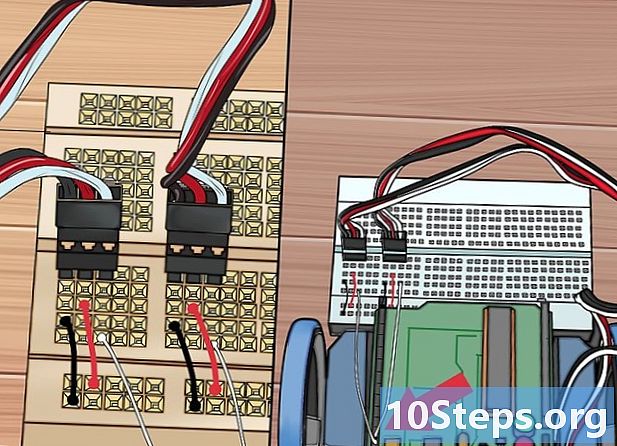
Paigaldage kaks pistikut. Pange kaks pistikut plaadi E rea piludesse 1-3 ja 6-8. Veenduge, et teil oleks neid hästi. -

Ühendage servokaablid pistikutega. Kui te seda teete, ühendage must kaabel vasakule küljele (pistikud 1 ja 6). See võimaldab servosid ühendada prooviplaadiga. Veenduge, et vasak servo oleks ühendatud vasaku pistikuga ja parem servo parempoolse pistikuga. -

Ühendage punased kaablid. Ühendage C2- ja C7-pistikute punased juhtmed prooviplaadi punase (positiivse) joonega. Kasutage kindlasti plaadi tagaküljel olevat punast rida (see, mis on ülejäänud raami jaoks kõige lähemal). -

Ühendage mustad kaablid. Ühendage pistikute B1 ja B6 mustad juhtmed prooviplaadi sinise (negatiivse) joonega. Kasutage kindlasti plaadi tagaosas olevat sinist rida. Ärge ühendage neid punase värviga reaga. -
Ühendage valged kaablid. Ühendage 12 ja 13 pistiku valged ühenduskaablid Arduino A3 ja A8 pistikutega. See võimaldab mikrokontrolleril servot juhtida ja rattaid pöörata. -

Kinnitage detektor plaadi esiküljele. Te ei tohiks seda installida katselaua vooluga ühendatud reas, vaid pigem esimeses reas asuvate pistikute reas J. Veenduge, et asetate selle keskele, nii et mõlemal küljel oleks võrdne arv pistikuid. -

Ühendage musta pistiku kaabel. Ühendage must ühenduskaabel I14 pistikust esimese detektoriga vasakpoolses sinises reas saadaoleva pistikuga. See on ühendatud maapinnaga. -

Ühendage punane ühenduskaabel. Ühendage punane pistikupesa kaabel I17 pistikust esimese detektori paremal küljel asuvas punases reas saadaoleva pistikuga. See toidab detektorit. -

Ühendage valge ühenduskaabel. Ühendage valge ühenduskaabel I15 pistikust Arduino 9 pistikuga ja teine valge kaabel I16 pistikust 8 pistikuga. See võimaldab teabe mikrokontrollerile edastada.
3. osa Ühendage toiteallikas
-

Pöörake robot, et näha patareidega külge. Orienteerige seda nii, et korpuse kaablid tuleksid vasakult altpoolt välja. -

Ühendage punane kaabel. Ühendage punane kaabel allpool asuva teise vedruga. Peate olema täiesti kindel, et juhtum on õigesti suunatud. -

Ühendage must kaabel. Ühendage must kaabel parema allserva viimase vedruga. Need kaks kaablit aitavad teil Arduinole õige pinge saada. -

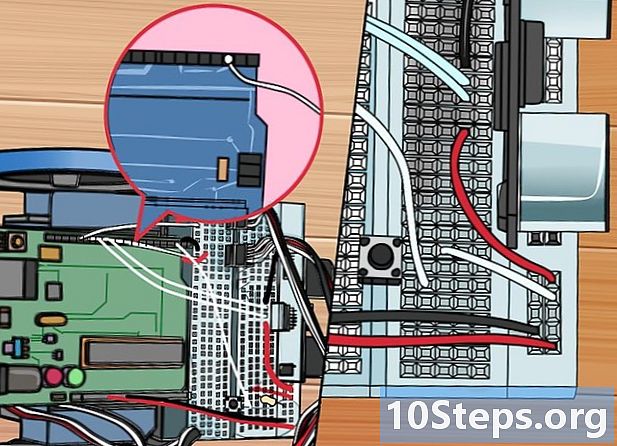
Ühendage punane ja must juhtmed. Ühendage punane ja must juhe tihvtidega, mis asuvad testplaadi taga paremas servas. Must kaabel tuleb ühendada pistiku 30 sinise joonega. Punane kaabel peab olema ühendatud pistiku 30 punase joonega. -

Ühendage must kaabel maapinnaga. Paigaldage must kaabel Arduino maanduspistiku (GND) ja taga oleva sinise rea vahele. Ühendage see plaadi pistikuga 28. -
Paigaldage teine must kaabel. Ühendage must juhe esikülje sinise rea tihvti 29 taga oleva sinise reaga. Ärge ühendage punaseid ridu, kuna see võib mikrokontrolleri kahjustada. -

Paigaldage punane kaabel. Ühendage punane juhe 30. ja Arduino 5V vahelise punase rea vahele. See annab mikrokontrollerile toite. -
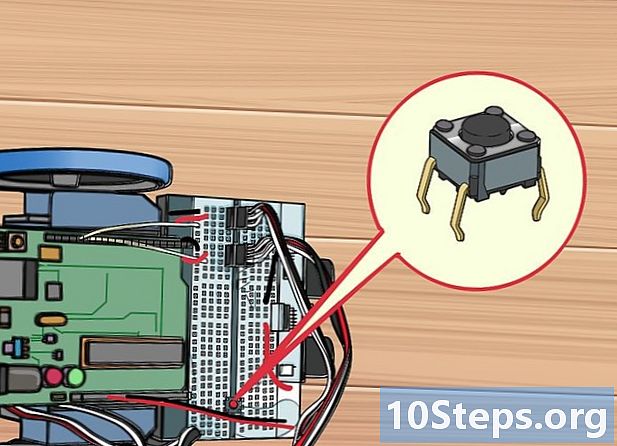
Paigaldage nupp. Paigaldage nupp tihvtide 24–26 ridadevahelisse ruumi. Lüliti võimaldab teil robotit sisse ja välja lülitada, ilma et peaksite toidet välja lülitama. -

Ühendage uus punane kaabel. Ühendage punane juhe pistiku H24 ja punase rea vahele detektorist paremal asuvasse järgmisse pistikusse. See toidab nuppu. -

H26 ühendamiseks sinise reaga kasutage takistit. Ühendage see otse ülaltoodud musta kaabli kõrval olevasse pistikusse. -
Ühendage valge kaabel G26 ja Arduino pistiku 2 vahele. See võimaldab Arduinol nupu olekut tuvastada.
4. osa Installige Arduino programm
-

Laadige alla ja installige IDE. LIDE on Arduino arenduskeskkond ja see võimaldab teil enne plaadile saatmist juhised programmeerida. Saate selle tasuta alla laadida saidil arduino.cc/en/main/software. Pakige lehis lahti, klõpsates sellel topeltklõpsuga ja viies kausta nurka, mida te kergesti mäletate. Te ei installi seda programmi tegelikult, vaid käivitate selle ekstraheeritud kaustast, klõpsates nuppu arduino.exe. -

Ühendage akukarp Arduinoga. Ühendage pistik Arduino tahvli pistikupessa selle toiteks. -
Ühendage Arduino arvutiga. Ühendage plaat USB-kaabli abil arvutiga. Tõenäoliselt ei tunne Windows seda ära. -

Vajutage ⊞ Võida+R ja tüüp käsk devmgmt.msc. Sellega käivitatakse haldusprogramm. -

Jätkake installimist. Paremklõpsake nuppu Tundmatu seade osas Muud seadmed ja vali "Uuendage draiveritKui te seda valikut ei näe, klõpsake nuppu omadused, klõpsake vahekaardil piloot, siis valige Uuendage draiverit. -

valima "Draiveri valimine arvutis'. See võimaldab teil valida draiveri, mis oli varustatud Arduino IDE-ga. -

Klõpsake nuppu navigate ja otsige kaust üles. Vajalikud draiverid leiate varem kaevandatud kaustast. -

Valige draiverid ja klõpsake nuppu "OK'. Kui teil on teadmata programmi tõttu hoiatus, kinnitage, et soovite jätkata.
5. osa Roboti programmeerimine
-

Käivitage IDE. Käivitage Arduino IDE, topeltklõpsates faili arduino.exe IDE kaustas. See avab uue projekti jaoks tühja lehe. -

Roboti sirgeks liikumiseks kleepige kood. Ülaltoodud kood liigutab robotit pidevalt edasi.#include
// see lisab programmile "servo" teegi // see loob kaks objekti mõlemale Servo vasakmootoriga servosse; Parempoolne mootor; void setup ()


